BiCopter دارای دوموتور
Bicopter می تواند ارزان ترین پیکربندی در بین مولتی روتورها را داشته باشد و آن هم بدلیل استفاده از دو موتور و دو سروو، اما این نوع از مولتی روتورها سخت ترین پلت فرم برای ایجاد پایداری در پرواز را دارا می باشد. همچنین این نوع پرنده دارای حداقل قدرت بلند کردن در بین مولتی روتوها نیز می باشد آن هم بدلیل استفاده از تنها دو موتور. Bicopter پیکربندی بسیار محبوب برای علاقمندان به مولتی روتورها نیست ، و اطلاعات زیادی درباره آنها وجود ندارد.
نحوه پرواز Bicopter

Tricopter دارای سه موتور

Tricopter دارای ۳ موتور در یک “Y” شکل می باشد که در آن بازوها معمولا با زاویه ۱۲۰ درجه از هم قرار دارند . تری کوپترگاهی اوقات می تواند “T” شکل باشد . دو ملخ بر روی بازوهای جلو چرخش در جهت مخالف یکدیگر قرار دارد و موتور عقب را می توان با یک سروو موتور برای فعال کردن مکانیسم انحراف و چپ و راست نمودن پرنده استفاده کرد. تری کوپتر می تواند یکی از ارزان ترین پیکربندی در بین مولتی روتورها را داشته باشد و آن هم بدلیل استفاده از سه موتور و یک سروو می باشد، اما این نوع از مولتی روتور یکی ازسخت ترین پلت فرم ها برای ایجاد پایداری در پرواز را دارا می باشد. همچنین این نوع پرنده دارای حداقل قدرت بلند کردن وزن در بین مولتی روتورها نیز می باشد آن هم بدلیل استفاده از تنها سه موتور می باشد.
نحوه پرواز تری کوپتر

QuadCopter دارای چهار موتور

رباتهای پرنده شاید تمامی پرندههای بیسرنشین را در بر بگیرد اما از نظربسیاری از کارشناسها کوادرتورها میتوانند به حق این لقب را یدک بکشند چون ترکیبی از مکانیک پرواز – الکترونیک و کامپیوتر میباشند. اما کوادرتور چیست؟
کوادرتور یا کوادکوپتر یا پرنده چهار ملخه نوعی عمودپرواز است که بخاطر استفاده از چهار ملخ بصورت صلیبی این لقب را به آن دادهاند. این نوع پیکربندی به پرنده این امکان را میدهد تا بتواند به راحتی و بطور مساوی در تمامی جهات حرکت کند و قدرت مانور فوق العادهای داشته باشد. اما این پرنده بر خلاف ظاهر ساده خود بسیار بسیار پیچیده است بطوری که طراحی این نوع از پرندهها در کشورهای محدودی انجام میگیرد. اما مشکل بزرگی که بر سر طراحی چنین پرندههایی وجود دارد مسئله پایداری این نوع از پرنده هاست که کار بسیار پیچیده ای است. در زیر به برخی از مشکلاتی که ممکن است تعادل پرنده را برهم بزند خواهیم پرداخت تا بیشتر با این مشکلات آشنا شوید.
شاید بتوان به جرات گفت که یکی از مهم ترین و کلی ترین کاربرد های یک کواد کوپتر جنبه تفریحی ، سرگرمی آن است !!! بله درست متوجه شده اید امروزه جنبه ی بازی و سرگرمی پرنده های پروازی به قدری افزایش پیدا کرده است که بسیاری از افراد مایل به خرید یک کواد کوپتر شخصی برای مصارف تفریحی ، سرگرمی خود هستند . اما بسیار جالب است که بدانید علاوه بر این کاربرد بسیار کلی ، کواد کوپتر ها کاربرد های بسیار مهم و حیاتی تری نیز دارند . یکی دیگر از کاربرد های پر مصرف و اشتغال زا این پرنده ها تصویر برداری و عکاسی هوایی ( هلیشات ) است . این نتیجه توسط کواد کوپتر ها و به طور کلی پرنده هایی که در زیر آن ها دوربین تعبیه شده است ، محقق می شود . مثلا بسیاری از کاربران با خرید یک کواد کوپتر دوربین دار از جمع های شخصی و خانوادگیشان عکاسی و فیلم برداری میکنند و از نتیجه کار بسیار لذت می برند . یا بسیاری از عکاسان و فیلم برداران با خرید پرنده های حرفه ای تر با دوربین های باکیفیت به عکاسی و فیلم برداری هوایی از بسیاری مراسمات من جمله عروسی ها می پردازند . یا کشاورزان عزیز برای فیلم برداری از زمین های کشاورزی خودشان و یا حتی برای چک کردن خطوط بسیار طولانی راهآهن و یا فیلم برداری از یک ساختمان در حال ساخت به عنوان پیشرفت پروژه و …
دسته ای از کواد کوپتر ها کواد کوپتر های محموله بر هستند : البته طراحی و ساخت چنین پرنده هایی در دست بررسی است اما با محقق شدن این موضوع به زودی بسیاری از شرکت ها و سازمان ها به جابه جایی محموله و بارهایشان توسط پرنده های بارکش می پردازند .
دسته ی دیگری از کواد کوپتر ها پرنده های ناجی هستند : به عنوان مثال رساندن کمک های اولیه به مصدومین در یک حادثه وسیع .
دسته ی بعدی کواد کوپتر های امنیتی هستند : پرنده هایی که برای کنترل و امنیت شخصی یا عمومی به کار می آیند . امروزه بسیاری از سازمان ها و نهاد های امنیتی از پرنده های بسیار کوچکی برای جمع آوری اطلاعات بهره می برند .
دسته بندی کواد کوپترها

کواد کوپتر ها در چند دسته طبقه بندی می شوند ؟
الف : کواد کوپتر ها از نظر سایز و اندازه به ۳ دسته کلی تقسیم می شوند :
نانو کواد کوپتر ها ، که ریز ترین مدل کواد کوپتر ها هستند .
میکرو یا مینی کواد کوپتر ها که از دسته اول کمی بزرگ تر هستند . این ۲ دسته معمولا استفاده تجاری و کاربردی زیادی ندارند و بیشتر برای تفریح و سرگرمی ساخته و عرضه می شوند .
دسته آخر نیز همان کواد کوپتر ها هستند که بسیار در مصارف تجاری مورد استفاده قرار می گیرند و جنبه ی سرگرمی نیز دارند .
ب : کواد کوپتر ها از نظر داشتن و یا نداشتن دوربین نیز به ۳ دسته تقسیم می شوند :
دسته ی اول کواد کوپتر هایی هستند که کلا دوربین ندارند و قابلیت نصب دوربین نیز برروی آن ها تعبیه نشده است . این دسته از پرنده ها بیشتر برای بازی و تمرین مورد استفاده قرار می گیرند .
دسته دوم کواد کوپتر هایی هستند که دوربین ندارند اما قابلیت نصب دوربین را دارا می باشند . این دسته از پرنده ها بسیار پرفروش و کاربردی هستند چرا که دوربین های باکیفیت گوپرو ، شیائومی و اسپورت کم براحتی بر روی آن ها نصب می شود . بسیاری از کاربران در هنگام انتخاب و خرید کواد کوپتر به کیفیت دوربین توجه میکنند . اگر کیفیت عکاسی و فیلم برداری بسیار حائز اهمیت باشد خرید یک کواد کوپتر بدون دوربین و یک دوربین با کیفیت بسیار منطقی و عقلانی است .
دسته آخر نیز کواد کوپتر هایی هستند که از طرف کمپانی به صورت پیشفرض دارای دوربین می باشند . بسیاری از پرنده های تفریحی سرگرمی دارای دوربین ، که در این دسته قرار می گیرند نیز قابلیت تعویض دوربین را دارند اما بسیاری از پرنده های حرفه ای که دارای دوربین و گیمبال هستند من جمله فانتوم ها قابلیت تعویض دوربین را ندارند و عملا به این کار نیز نیازی نیست . علت این امر این است که کیفیت دوربین آن ها بسیار بالاست و قطعا پاسخ گوی نیاز کاربران خواهد بود .
ج : دوربین های تعبیه شده بر روی پرنده ها در ۲ دسته کلی قرار می گیرند :
دسته اول دوربین هایی هستند که قابلیت ارسال تصویر لحظه ای را دارا می باشند به این تکنولوژی اف پی وی (FPV) گفته میشود که مخفف “First Person View” است . یعنی در حین پرواز با استفاده از مانیتور ، تلفن همراه ، تبلت و یا عینک مخصوص می توانید عکاسی و فیلم برداری هوایی خود را مشاهده کنید تا بهترین خروجی را با کم ترین خطا ضبط کنید .
دسته دوم دوربین هایی هستند که ارسال تصویر لحظه ای ندارند . این دوربین ها دارای یک SD کارت می باشند و تمامی خروجی کار شما را بر روی رم ذخیره می کنند . شاید این سوال برای شما به وجود بیاید که وقتی به صورت لحظه ای تصاویر را نمیبینید چطور باید متوجه شوید که بر روی سوژه مدنظرتان فوکوس کرده اید ؟ سوال بسیار مناسبی است اما باید بدانید که لنز دوربین اغلب این پرنده ها ۱۲۰ درجه و عریض می باشد لذا کافیست تا سر پرنده به سمت سوژه باشد . آسوده خاطر باشید که سوژه و تمامی مناظر و لوکیشن اطراف سوژه تان در تصویر ثبت و ضبط می شوند .
دسته دیگری از دوربین ها وجود دارند که علاوه بر ارسال تصویر لحظه ای تا محدوده ای که در برد wifi باشد قابل مشاهده هستند و پس از آن یک رم نیز دارند که بعد از قطع ارسال تصویر لحظه ای و دور شدن پرنده خروجی بر روی رم ذخیره شود تا در سرتاسر پرواز تصاویر و ویدئو های شما ثبت شوند .
د : دسته ی دیگری از کواد کوپتر ها که بسیار نیز محبوب هستند کواد کوپتر های مسابقه ای ( race ) و یا سرعتی هستند . سرعت حرکت این پرنده ها نسبت به مدل های عادی بسیار بیشتر است و مسابقات متعددی پیرامون این پرنده ها برگزار می شود .
عوامل مختل کننده تعادل کوادکوپترها:
۱) تغییر دور ناخواسته پره ها و عدم تعادل در سرعت چرخش پره ها: این امر ممکن است بخاطر عوامل زیاد و گوناگونی اتفاق بیفتد ازجمله اصطکاک متفاوت موتورها بخاطر کثیفی موتورها یا همدور نبودن خود موتورها یا عدم همخوانی استپهای کنترل دور یا مسائلی از این دست .
۲)عدم تعادل وزنی پرنده: این مسئله که بسیار شایع است ممکن است بخاطر عواملی چون تغییر مرکز ثقل و یا نصب نامتقارن تجهیزات اصلی و یا فرعی مانند دوربینها و سنسورها و یا عوامل خارجی دیگر رخ دهد.
۳) اما مهمترین مسئله در عدم پایداری باد است: باد به تنهایی میتواند تعادل تمامی پرنده ها را برهم بزند و کوادرتور هم جدا از این مسئله نیست. اما بادها جور دیگری هم خودنمایی میکنند و ان تاثیر باد ناشی از خود ملخها که شامل جریان گردابی ملخها و جریان برگشتی از سطح زمین میشود که بصورت نامتعادل به خود پرهها و بدنه پرنده برخورد کرده و بشدت تعادل پرنده را برهم میزند.
اما اثر مشکل عدم تعادل به این گونهای است که اگر پرنده به هر دلیلی از دلایل فوق ۱درجه و شاید هم کمتر از تعادل خارج شود بردار رانش موتورها از حالت عمود خارج شده و پرنده به صورت ناخواستا به یک سمت حرکت میکند که این امر با ازدیاد زاویه ناپایداری سرعت بیشتری میگیرد به طوری که باعث برخورد ناخواسته و عدم ثابت ایستادن پرنده میشود و در نهایت منجر به سقوط و انهدام پرنده میشود.
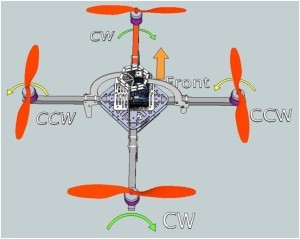
کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است. یعنی به این صورت که دو ملخ روبروی هم به صورت همجهت به یک سمت میچرخد و دو ملخ روبروی دیگر که باز روبروی هم قرار دارند به صورت همجهت بوده و در خلاف جهت جفت ملخ اول میچرخد. برای درک بهتر موضوع به عکس زیر توجه کنید:
اما دلیل این امر این است که که ملخها دو به دو اثر عکس العمل همدیگر را خنثی کنند.
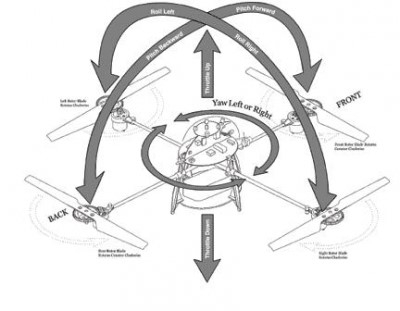
شیوه کنترل حرکت کوادکوپترها:
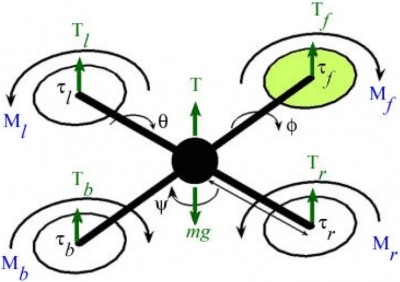
برای حرکت پرنده در محور عمود باید دور جفت ملخهای یک جهت کم و به همان مقدار دور جفت ملخ جهت مخالف افزوده شود. این کار باعث میشود بدون تغییر ارتفاع نیروی عکسالعمل یک سمت از سمت دیگه بیشتر شود و در نتیجه پرنده در یک سمت حول محور عمودی میچرخد. اما برای حرکت پرنده حول محور عرضی و طولی لازمه بین دو ملخ همجهت یک تفاضل دور به وجود بیاوریم. به این ترتیب یک سمت پرنده به سمت بالا رفته و طرف دیگر به سمت پایین میل پیدا میکند که این امر باعث کچ شدن بردار رانش و حرکت پرنده به سمتی که بازویش پایین تر است میشود و هر چه مقدار این انحراف بیشتر باشد سرعت پرنده نیز بیشتر میشود. برای تغییر ارتفاع هم فقط کافیست سرعت هر ۴ ملخ را با هم کم یا زیاد کنیم
اجزای سخت افزاری کوادکوپترها:
موتور: اکثر کوادروتورهای پیشرفته از موتورهای براشلس برای حرکت استفاده میکنند. این نوع موتورها بسیار کوچک- سبک و پرقدرت میباشند. دلیل این امر هم این است که بخاطر عدم وجود جاروبک یا همان زغال در این نوع موتورها هم اصطکاک بسیار کم بوده و نیز میتوان توان و جریان بالایی را به موتور اعمال کرد. این موتورها به دونوع اینرانر(قسمت داخلی موتور میچرخد) و اوترانر(قسمت خارجی یا پوسته میچرخد) تقسیم بندی میشوند که در کوادرو ها اکثرا از نوع اوترانر انهم بخاطر دور پایین استفاده میشود.
اسپید کنترل : یا همان راه انداز موتور براشلس است. در موتورهای براشلس بخاطر عدم وجود جاروبک عمل کموتاسیون وتغییر قطبها و در نهایت چرخش موتور بصورت مصنوعی و توسط اسپید کنترل یا درایو موتور براشلس انجام میشود. اصول کلی کارکرد این قطعه بر اساس تولید نوسان که برق مستقیم را به صورت متناوب در میآورد نیز میباشد.
در انتخاب درایور باید دقت بسیاری شود که تعداد استپهای پیشبینی شده در درایور هر چه بیشتر باشد پرنده پروازی نرمتر و پایدارتری را به نمایش خواهد گذاشت.
ملخ : در انتخاب ملخ دو فاکتور از بقیه پر اهمیت تر است و آن طول و گام ملخ است که معمولا به اینچ و به صورت پیوسته بروی ملخ نوشته میشود. برای مثال ملخ ۶*۸ ملخی است با طول ۸ اینچ و گام ۶۶ اینچ. گام یا همان میزان پیشروی به میزان پیشروی ملخ در هر دور در واحد اینچ نیز اطلاق میشود. البته ملخها از منظر نوع موادی که در ساخت آن به کار رفته هم به چند دسته تقسیم بندی میشوند که از ان جمله میتوان به ملخهای چوبی – پلاستیکی و مواد مرکب یا کربنی نیز اشاره کرد.
باطری : شاید دغدغه اصلی سازندگان وسایل پرنده الکتریکی تامین انرژی این نوع از پرنده ها است. شاید در گذشتهای نه چندان دور این امر تا حدودی غیر ممکن مینمود اما با ورود و عرضه باطریهای لیتیوم پلیمر یا همان لیپو دنیای پرنده های الکتریکی وارد مرحله جدیدی از زندگی خویش شد. چون باطریهای لیپو با دارا بودن وزن کم-قدرت زیاد و قدرت تخلیه جریان بسیار بالا میزان ساعت پروازی به مراتب بالاتری را به پرنده های الکتریکی میدهند.
شاسی یا بدنه : اما اخرین قسمت، بدنه پرنده است که میتوان از بیشتر مواد سبک وزن در ساخت ان استفاده کرد اما در پرنده های حرفه ای تا نیمه حرفه ای اکثرا از الیاف کربن برای ساخت بدنه کوادروتورها استفاده میشود چون الیاف کربن با دارا بودن مقاومت بسیار بالا وزن بسیار کمی را به خود اختصاص میدهند.
اتوپایلوتها عموما از شتابسنجها – جایروها یا همان ژیروسکوپها و قطبنمای دیجیتالی و به صورت ۳درجه ازادی و ۶ و ۹ و حتی ۱۲ درجه از ازادی تشکیل شده که هر چقد تعداد درجه های ازادی بیشتر باشه پرنده پایدارتر-حرفه ای تر و مسلما گرانتر خواهد بود.
شتابسنج: شتابسنجها بر اساس گرانش زمین کار میکنند و میتوانند زاویه دقیق سطحی که روی آن قرار دارند را حتی در حالتی که خاموش هستند اندازه گیری کنند و در نتیجه وقتی آنها را در حالت بدون تغذیه روی سطحی بگذاریم و بعد با اتصال تغذیه به آن روشنش نماییم میتواند زاویه سطح را برای ما اندازهگیری کنند خصوصیتی که در ساخت کوادرتورها بسیار مهم است. شتابسنجها عموما از نظر تعداد محورهای ازادی که عموما دو ویا سه محوره هستند تقسیم بندی میشوند و در مدلهای مختلف دارای دقت های متفاوتی نیز میباشند.
اما مشکل بزرگی که شتابسنجها دارند این است که بهشدت به لرزش حساسند و لرزشها روی آنها اثر بسیار بدی میگذارد و کاملا سیستم را به اشتباه میاندازد.
ژیرسکوپ: ژیروسکوپ سرعت زاویهای را به ما نشان میدهد که میشود از آن زاویه را بهراحتی استخراج کرد. اما مشکلی که دارد این است که زاویه را نسبی نشان میدهد یعنی اگه آن را روی هر سطحی بگذاریم و روشنش کنیم همان نقطه و زاویه اولیه را مبنا و صفر در نظر میگیرد. بخاطر همین زاوایایی که نشان میدهد کاملا با مقدار واقعیش میتواند متفاوت باشد. دسته بندی ژیروسکوپها هم بر اساس تعداد محورهای آنها است که به صورت ۱و۲و۳ محوره در بازار یافت میشود. اما از قطبنماها هم که بصورت یک و دو و سه محوره در بازار یافت میشود در برخی از کوادها استفاده میشود و دلیلش این است که بتواند با افزایش درجه آزادی دقت نهایی را افزایش بدهد. البته اهمیتش مثل جایرو و شتابسنج نیست. اطلاعاتی که از این سنسورها بدست میآید در یک پروسسور پردازش میشود. سیستم با دریافت این اطلاعات یعنی از هر محور دو ویا سه ویا بیشتر دیتا به پروسسور وارد میشود و پردازشگر با مقایسه این داده ها باهم سعی میکند نزدیکترین زاویه را نسبت به زاویه واقعی استخراج کند و برای تصحیح مسیر فرمان درست را صادر کند. البته تمامی این کارها باید در کسری از ثانیه انجام بشود. اما چیزی که کار را مشکل کرده در آوردن زاویه صحیح از بین آن همه لرزش بدنه ناشی از حرکت ملخها و تشخیص دیتای صحیح از بین انبوه نویزهاست که بخش اعظم کار همین جا است.
یک کوادکوپتر دارای ۴ موتور نصب شده بر روی یک قاب متقارن است که بازوها معمولا ۹۰ درجه برای پیکربندی X4 از هم جدا هستند. دو موتور دارای چرخش CW (درجهت عقربه های ساعت)، و دوموتور دیگر CCW چرخش (درخلاف جهت عقربه های ساعت) برای ایجاد نیروی مخالف و برای نگهداشتن تعادل قرار دارند. کوادکوپتر محبوب ترین پیکربندی در بین مولتی روتورها بدلیل ساده بودن ساختار مکانیکی را دارا می باشد.
نحوه پرواز کوادکوپتر
Hexacopter دارای شش موتور

هگزا کوپتر ها ( hexacopter ) از زیر شاخه خانواده بزرگ مولتی روتور ها هستند . پرنده های عمود پروازی که برای مصارف گوناگون تولید می شوند . ساختمان و شکل بدنه هگزا کوپتر ها به گونه ای است که در طراحی آن از ۶ موتور استفاده شده است . به تبع بهره گیری از این ۶ موتور ۶ ملخ نیز دارند . همانطور که در مبحث قبلی بیان شد حداقل تعداد موتور ها در ساخت یک مولتی روتور باید ۲ عدد به بالا باشد . هگزا کوپتر ها با بهره گیری از ۶ موتور جزو قوی ترین و پرکاربرد ترین پرنده های دست ساز برای پروژه های مهم و حساس هستند . از هگزا کوپتر ها برای مصارف تجاری ، نظامی ، تفریحی ، فیلم برداری و عکاسی هوایی و … بهره گرفته می شود .
نحوه پرواز هگزاکوپتر

Octocopter دارای هشت موتور

اوکتا کوپتر چیست ؟
اوکتاکوپتر ها ( octacopter ) از زیر شاخه خانواده بزرگ مولتی روتور ها هستند . پرنده های عمود پروازی که برای مصارف گوناگون تولید می شوند . ساختمان و شکل بدنه اوکتاکوپتر ها به گونه ای است که در طراحی آن از ۸ موتور استفاده شده است . به تبع بهره گیری از این ۸ موتور ۸ ملخ نیز دارند . همانطور که در مبحث قبلی بیان شد حداقل تعداد موتور ها در ساخت یک مولتی روتور باید ۲ عدد به بالا باشد . اوکتاکوپتر ها با بهره گیری از ۸ موتور جزو قوی ترین و پرکاربرد ترین پرنده های دست ساز برای پروژه های مهم و حساس هستند . از اوکتا کوپتر ها برای مصارف تجاری ، نظامی ، تفریحی ، فیلم برداری و عکاسی هوایی و … بهره گرفته می شود .
به طور کلی دایره کاربرد پرنده های پروازی بسیار وسیع است ، به گونه ای که نمی توان تمامی کاربرد ها را به صورت تفکیکی دسته بندی کرد .
اما به طور کل با پیشرفت علم و تکنولوژی آینده ی بسیار روشنی در انتظار پرنده های پروازی برای مصارف گوناگون است .


