
سیستم کنترل پرواز چیست؟
هر مجموعه سیستم پروازی ، دارای یک واحد کنترل کننده و فرماندهی می باشد ,سیستم های پروازی بدون سرنشین نیز قطعا از این قاعده مستثنی نیستند. سیستم کنترل پرواز در مولتی روتورها یکی از حیاتی ترین بخش ها در مولتی روتورها می باشد، زمانی که که یک مولتی روتور می سازید بایستی به این نکته توجه داشته باشید که موتورها برای تولید نیروی برخاست عمودی ، بایستی به شکل مناسبی بر روی بدنه قراربگیرند و در این حالت برای ایجاد تعادل هواپیما ، نیاز به یک مدیریت حرفه ای و قوی می باشد ، این مدیریت حرفه ای در واقع همان سیستم کنترل پرواز می باشد که هسته مرکزی مولتی روتور را تشکیل می دهد.
نحوه عملکرد فلایت کنترل در هواپیماهای بدون سرنشین
فلایت کنترل ، تنظیم و کنترل پرواز هواپیما با دقت زیاد را برای خلبان را فراهم می نماید. در دهه های گذشته بدلیل اینکه فلایت کنترل ها به شکل امروزی دارای دقت خوبی نبودند اغلب پرواز هواپیماهای بدون سرنشین با دقت زیاد همراه نبود اما امروزه بدلیل پیشرفت علم کنترل پرواز الکترونیکی ، مشاهده می نماییم این فلایت کنترل ها دارای دقت به مراتب بیشتری نسبت به گذشته شده اند.
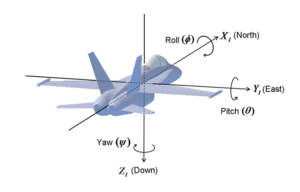
فلایت کنترل ، هواپیما را با استفاده از سطوح آیرودینامیکی ( ایلرون ، رادر ، الیویتور ) در محورهای pitch roll ، yaw کنترل می نماید که در ادامه به بررسی این سطوح کنترلی می پردازیم. قبل از توضیح سطوح آیرودینامیکی لازم است با دستگاه مختصات هواپیما و چگونگی کنترل هواپیما توسط خلبان (از لحاظ آیرودینامیکی)آشنا شویم .
به محوری که دم را به دماغه وصل می کند محور طولی(محو x) ، محوری که نوک دو بال را بهم وصل می کند محور عرضی(محور y ) و محوری که به صفحه ی تشکیل شده از این دو محور عمود است ، محور عمودی (محور z) می گویند.
به چرخش هواپیما حول محور طولی، Roll ، به چرخش هواپیما حول محور عرضی Pitch و به چرخش هواپیما حول محور عمودی Yaw می گویند.
سطوح کنترلی هواپیماها
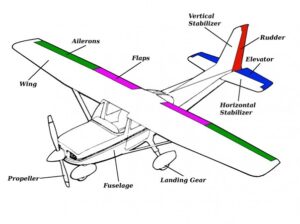
ایلرون ( Aileron ) : یکی از سطوح کنترلی هواپیماست که روی بال ها قرار دارد.
رادر ( rudder ) : رادر سطحی است که روی دم عمودی نصب می شود و به چپ و راست حرکت می کند.
الویتور ( Elivator ) : الویتور روی دم افقی قرار می گیرد و به سمت بالا و پایین حرکت می کند.
چه نیروهایی بر هواپیما در حین پرواز وارد می شود؟
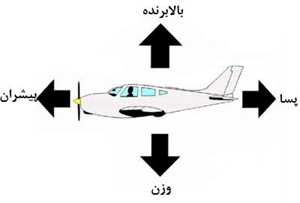
نیروهای وارد بر هواپیما در حین پرواز شامل نیروهای : Lift ( نیروی بالا برنده یا برآ ) ، Drag ( نیروی مقاومت یا پسا ) ، نیروی وزن هواپیما و نیروی Thrust ( نیروی پیشران )
حال که با کلیات مباحث پروازی و آیرودینامیکی یک هواپیما آشنا شدیم اینک با مرکز فرماندهی و کنترل هواپیما ( فلایت کنترل ) آشنا می شویم.
بررسی فلایت کنترل های مورد استفاده در مولتی روتورها
فلایت کنترل ها از لحاظ دقت فرامین و تعداد جایروها به دو دسته آماتور و حرفه ای تقسیم بندی می شوند که در فلایت کنترل های با آماتور تعداد جایروها کمتر از ۳ و هزینه فلایت کنترل پایین می باشد و از آنها عموما در هواپیماهای کوچک استفاده می شود، فلایت کنترل های حرفه ای دارای تعداد جایروهای بیش از ۳ هستند و عموما دارای دقت پرواز بالایی هستند.
انواع فلایت کنترل
سیستم های کنترل پرواز ( فلایت کنترل ) در هواپیماهای بدون سرنشین به دو دسته تقسیم بندی می شوند :
۱- فلایت کنترل های آماتور که اغلب در هواپیماهای بدون سرنشین بال دار و مولتی روتورهای سبک و ارزان استفاده می شوند
۲- فلایت کنترل های حرفه ای که اغلب در مولتی روتورهای حرفه ای استفاده می شود
فلایت کنترل از چه قطعاتی تشکیل شده است؟
۱- واحد فرماندهی یا ( main control )

این عضو مهم با داشتن سنسور های متفاوت مانند ژیروسکوپ ها و بارومترها ، وظیفه فرمان دادن به درایورهای موتور یا همان اسپید کنترل ها را بر عهده دارد که این عمل باعث شناور ماندن پرنده در آسمان و حفظ شناوری به شکل اتوماتیک با سطح افق را سبب می شود. واحد فرماندهی یا main control خود شامل واحدهای PMU، IMU، Compass GPS و LED می باشد که در ادامه به توضیح هر قسمت می پردازیم.
۲-واحد تقسیم ولتاژ و کنترل ماژول ها یا ( PMU: power management unit )

این عضو وظیفه کنترل و تقسیم صحیح ولتاژ های ورودی و خروجی و برق رسانی و اتصال آن ها به واحد فرماندهی را بر عهده دارد.
۳- واحد کنترل اینرسی پرنده ( IMU: Inertial Measurement Unit )

این عضو حرکت خطی و زاویه ای هواپیما را با یک ژیروسکوپ و شتاب سنج سه گانه اندازه گیری می کند که محاسبات مربوط به این عضو است که سبب تثبیت هرچه بیشتر مولتی روتور در محورهای مختصات می شود.
۴- ماژول تثبیت کننده در یک نقطه یا ( Compass GPS )

این عضو در سیستم ناوبری که یک مورد اضافه شده برای کنترلر به حساب می آید که با اضافه نمودن آن به سیستم کنترلر شما می توانید با استفاده از قطب نما و GPS پرنده ی خود را شناور در یک نقطه ثابت نگه دارید.
۵- ماژول هشدار دهنده ( LED )

وظیفه این ماژول نشان دادن وضعیت سیستم ناوبری پرنده می باشد.این ماژول وظیفه بیان اطلاعات سیستم ناوبری به زبان رنگ ها می باشد.بدین معنا که با تغییر رنگ ها اطلاعات ذیل را بیان می کند:
۱-هشدار اتمام باتری پرواز
۲-وجود یا عدم وجود سیگنال های ارتباطی و رادیویی
۳-وجود یا عدم وجود سیگنال های جی پی اس
۴-حالت های پروازی پرنده ( GPS mode or Atti mode )


